
米ニューヨークで9月20・21日に開催されたWorld Maker Faire New York 2014より。
会場にはさまざまな出展ブースがあり、少人数や個人のIoT作品で目についた分野の1つがLeap Motion、Kinectなどのモーションセンサーやタッチセンサーを使ったロボットやガジェットなどの展示です。その中から3つご紹介します。なお、既報の3Dプリンターを使ったロボット制作プロジェクトinMoovのデモロボットもKinectを使っています。






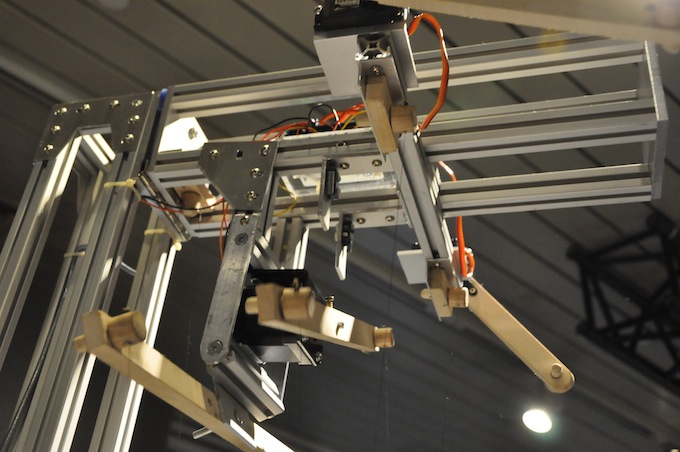
Humanoid Robotic ArmはKinectで動くカーボン製のロボットアーム。Christpher M. Sharkey氏とJohn Hill氏の作品です。可能な限り簡単で単純な人型ロボット・ロボットアームを作り、人間の運動を模倣するよう、テーマを決めて研究開発を進めています。

このロボットアームは機械部分以外全て炭素繊維でできており、Kinectで動作を以下のようにコントロールします:
- Kinectは3次元で人間の動きを捉え、アルゴリズムを実行するPCにデータを送信
- PCでベクトルデータに分解処理し、肩と肘関節の角度を測定する
- 測定結果をArduinoを経由して戻し、ロボットアームが動く

Leap Motionで動かすゲームLabyrinth Kinetic Game。Amerigo levoli氏、Daniele Martini氏の作品です。金属製のボールを転がしてゴールを目指すラビリンス(迷宮)ゲームの箱をLeap Motionで傾けながら遊びます。途中に仕掛けてあるトラップで止まらず、穴にボールを落とさないようにコントロールするのはなかなか難しいようです。
展示にはスケルトンモデルも用意されており、モデルを見ながら説明を受けている最中に子供がずっと熱中しながら遊んでいました。単純なゲームですが、実際にゲーム盤に触れないで動かすのは勝手が違う様子でした。

こちらがLabyringhのスケルトンモデル。Leap MotionはPCにつなぎ、手の動きを分析。分析結果に従って角度などのデータをArduinoに送り、Arduinoに接続した2台のサーボモーターでゲーム盤を動かします。Leap Motion、Arduino共に1個で動かしているとてもシンプルな構成です。

Wireless Data Gloves with novel Applicationsは、両手に付けた手袋の各指と手のひらにタッチセンサーを付けて9つの角度を測定し、動作を検知してマリオネット(糸操り人形)を動かします。Kevin Marinelli氏の作品です。
両手のグローブには無線モジュール、9つの角度を測定するセンサー、タッチセンサーパッドなどが付いており、指や手の細かい動作やタッチした内容を細かく捉えることが可能。そのデータを分析し、マリオネットを動かすコントローラーがマリオネットの40個のパーツにつながっている糸を引くと、マリオネットが動きます。
残念ながらブースを訪れた時は調整中で、グローブと連動したデモは見られませんでした。代わりに事前に準備されていたプログラムを実行して両手・両足を順に動かしています。なお、一緒にデモを見ていた人が「これは手話を読み取れるのか?」と質問していましたが、現在手話のジェスチャーには対応していません。以前より同じリクエストがあるそうなので今後手話と組み合わせて聴覚にもっと豊かな表現ができるよう工夫できればと考えているそうです。