ドイツの産業用ロボットメーカーFestoが、まるで本物のように協力してエサを運ぶロボットアリや、ひらひらと空をとぶロボット蝶を開発しました。続きに掲載した動画でそのリアルな動きを確認できます。






Festo は産業用オートメーション機器を生産する企業。たとえばセンサーや電磁弁、サーボモーター、空気圧システムなど、工場の生産ラインや自動車といった機械を動かすために欠かせない様々な部品群を生産しています。
工場の生産ラインにおいては最終的に製品となるワークの流れが滞らないよう、各パートの協調した動作が要求されます。各所に配置したセンサーがワークの流れを信号に変換し、その情報を瞬時に処理してワークに加工を施し、さらに下流の動作を制御していく生産ラインの流れは、ある意味ロボットを動作させるしくみとよく似ています。
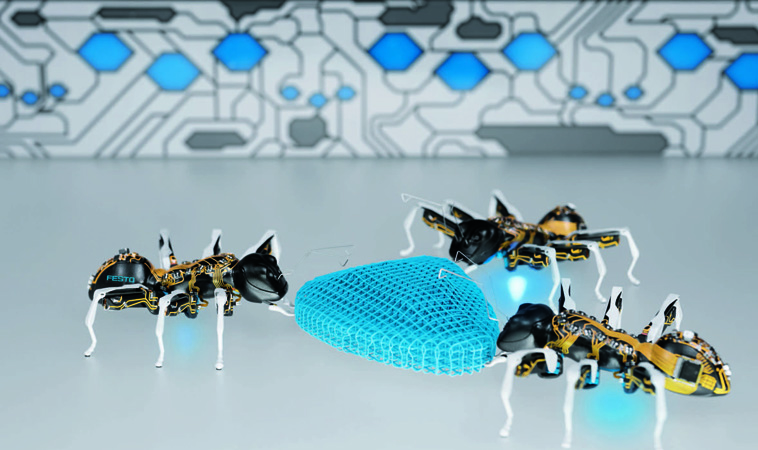
Festo は数年前から大学や各種研究機関などと共同で「バイオニックラーニングネットワーク」を構築し、『自然の原理に学ぶ』をテーマとしたテクノロジーを研究しています。今回 Festo が発表したのはアリと蝶の生物模倣ロボット。アリはその強力な顎で小さな体の何倍もの重さがある餌を持ち上げることができます。また多数の固体が協力・協調して一つの仕事をこなします。
Festo のロボットアリ「Bionic ANTs」は電圧を加えると物質が変形するピエゾ効果で足や顎を動かし、ステレオカメラで物体を認識します。自然界のアリが持つ協調性も備えており、ある個体が大きな餌(を模した物体)を運び始めると、残りの固体もそれに加わって協力体制を構築します。
こうしたロボットアリの動作はすべて骨格表面に配置した回路が処理をしています。この骨格は3D-MID (Molded Interconnect Device)技術によってボディに直接電子回路を搭載しています。
ロボット蝶「eMotionButterflies」は、軽量な骨格と大きな羽をもち、本物と同様に空中をひらひらと飛び回ります。とはいえ、それだけであればこれまでにも似たようなロボットはありました。
Festo が開発したロボット蝶は屋内 GPS を利用し、壁にぶつかることなく方向転換もできます。軽量化のためバッテリー容量は小さく、飛行時間は3-4分と短め。それでも復数で飛んでいる場合は互いを認識し、グループを組んで飛ぶといった芸当もこなします。
最後は、より実用的なスタイリングをした「FlexShapeGripper」。参考にしたのはカメレオンの舌です。実際のカメレオンの舌は粘液によって昆虫などを捕まえますが、それだけではなく舌先でしっかりと獲物を包むように変形します。Festo のロボットアームもグリップ部分においてカメレオンの舌先を模倣することで、単純な構造ながらなんでもつかめるようになっています。
青いグリッパー部分はシリコン素材を用いており、内部は2つの空間に区切られています。複動式シリンダーの動作によって変形が可能で、ワークをつかむ際はグリッパーを押し当てて、くるみ取る格好で持ち上げます。弾力性と柔軟性のあるシリコン素材の保持力は高く、ワークをしっかりと抱え込むことができます。
また、表面を凹ませて吸盤のように使うことも可能。スマートフォンのような平面的な物であっても持ち上げることができます。
ロボット開発といえば、米国のDARPA が開発を主導する四脚歩行ロボットなど軍事目的のものや、Pepper のような対人・エンタメ系のロボットがよく話題にのぼります。そんななかで Festo のロボットは、開発を通じて得た技術が生産の現場へと直接的に還元されているところが、他のロボット開発に対する特徴と言えそうです。
ちなみに DARPA が支援して開発されたものの中にも、「なんでもつかめるロボットハンド」がありましたが、こちらの目的はやはり軍用ロボット向けとのこと。
