





°°µÞ¬Æ§Àø ≤Ω§π§Î•Ì•Ð•√•»≥´»Ø§Œ∏Ωæϧ¿§¨°¢§≥§Œ≈Ÿ ∆•Þ•µ•¡•Â°º•ª•√•ƒπ©≤ ¬Á≥ÿ° MIT°À§Œ≤ ≥ÿº‘§¨•¡°º•ø°º∑ø•Ì•Ð•√•»§Ú¡ˆ§È§ª§ §¨§È•œ°º•…•Î§Ú»Ù§”±€§®§µ§ª§Î§≥§»§À¿Æ∏˘§∑§ø°£§≥§Ï§œ4¬≠•Ì•Ð•√•»§¨º´Œß≈™§À•È•Û•À•Û•∞•∏•„•Û•◊§Ú¿Æ∏˘§µ§ª§øΩȧ·§∆§ŒªˆŒ„§«§¢§Î°£
•π•ð•Û•µ°º•…•Í•Û•Ø
°°•È•Û•À•Û•∞•∏•„•Û•◊§Úº¬π‘§π§Î§À§œ°¢•Ì•Ð•√•»§œ§Þ§∫°¢øÕ¥÷§Œ•È•Û• °º§»∆±§∏§Ø°¢¡ˆ§Î∑–œ©§Ú∑˧·§ §±§Ï§–§ §È§ §§°£º°§Àæ„≥≤ ™§À∂·§≈§≠§ §¨§È°¢§Ω§Œπ‚§µ§»µ˜Œ•§Úø‰¬¨§π§Î°£§Ω§∑§∆°¢•∏•„•Û•◊§π§Î∫«≈¨§ ∞Ã√÷§Ú¬¨§Í°¢ ‚…˝§Úƒ¥¿∞§∑§ø§È°¢»Ù§”±€§®§Î§ø§·§ŒŒœ§Ú𑪻§π§Î°£§µ§È§À°¢æ„≥≤ ™§Œπ‚§µ§À¥§≈§§§∆°¢Ãµªˆ√Â√œ§π§Î§ø§·§ŒŒœ§Ú≈¨Õ—§∑°¢∏µ§Œ•⁄°º•π§À÷§Î°£
°°
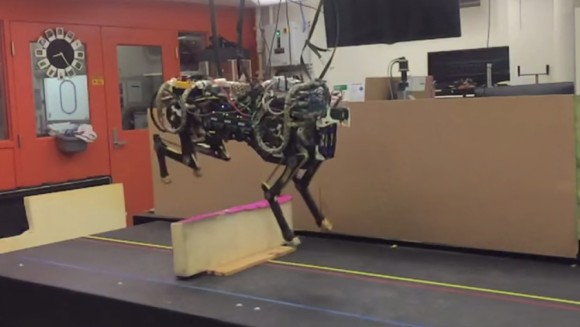
°°•»•Ï•√•…•þ•Î§»≤∞∆‚•»•È•√•Ø§Úª»§√§øº¬∏≥§«§œ°¢•¡°º•ø°º•Ì•Ð•√•»§œ ø∂—ª˛¬Æ8km§«¡ˆ§Í§ §¨§È°¢π‚§µÃÛ46cm§»§§§¶°¢º´ ¨§Œ»æ ¨§€§…§Œπ‚§µ§Œæ„≥≤ ™§Ú∏´ªˆ§À»Ù§”±€§®§ø°£
MIT cheetah robot lands the running jump
°°°÷•È•Û•À•Û•∞•∏•„•Û•◊§œº¬§À•¿•§• •þ•√•Ø§ π‘∆∞§«§π°◊§»∏ϧΧŒ§œ°¢MIT§Œµ°≥£π©≥ÿ§ŒΩı∂µº¯°¢∂‚¡Í«ðª·§¿°£°÷•–•È•Û•π§»•—•Ô°º§Ú¥…Õ˝§∑°¢√Â√œ§Œæ◊∑‚§À§‚¬–±˛§«§≠§ §±§Ï§–§ §Í§Þ§ª§Û°£ª‰§ø§¡§Œ•Ì•Ð•√•»§œ°¢§≥§¶§∑§øπ‚≈Ÿ§À•¿•§• •þ•√•Ø§ π‘∆∞§À∆√≤Ω§∑§∆¿þ∑◊§µ§Ï§∆§§§Þ§π°◊
°°∂‚ª·§Œ•¡°º•ý§œ°¢6∑Ó§À ∆πÒÀ…π‚≈˘∏¶µÊ∑◊≤Ë∂…§Œ•Ì•Ð•∆•£•Ø•π°¶•¡•„•Ï•Û•∏§À§™§§§∆°¢•¡°º•ø°º•Ì•Ð•√•»§À§Ë§Î•È•Û•À•Û•∞•∏•„•Û•◊§Ú»‰œ™§∑°¢7∑Ó§À§œ≥ÿ≤Ò§«º´Œß•∑•π•∆•ý§ŒæÐ∫Ÿ§À¥ÿ§π§Îœ¿ ∏§Ú»Ø…Ω§π§ÎÕΩƒÍ§«§¢§Î°£
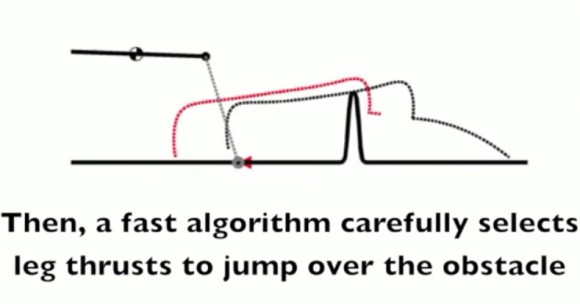
∏´§∆°¢¡ˆ§√§∆°¢•∏•„•Û•◊
°°∫Ú«Ø9∑Ó°¢∆±•¡°º•ý§œ°¢•¡°º•ø°º•Ì•Ð•√•»§¨≤ø§À§‚∑“§¨§Ï§∫§À¡ˆ§Ï§Î§≥§»§Úº¬æ⁄§∑§ø°£∂‚ª·§œ§≥§Œµ°«Ω§À§ƒ§§§∆°¢•´•·•È§ §…§ŒªÎ≥–•∑•π•∆•ý§Ú≈Î∫Ч∑§∆§§§ §´§√§ø§≥§»§´§È°¢°…Ã’Ãа…§Œ•—•’•©°º•Þ•Û•π§»∏∆§Û§«§§§ø°£
°°§¿§¨°¢∫£≤Û§Œ•Ì•Ð•√•»§œ°¢LIDAR§»§§§¶•Ï°º•∂°º§Œ»øºÕ§ÚÕ¯Õ—§∑§∆√œ∑¡§Ú•Þ•√•‘•Û•∞§π§ÎªÎ≥–•∑•π•∆•ý§Ú≈Î∫Ч∑§∆§™§Í°¢°…∏´§Î°…§≥§»§¨§«§≠§Î°£∏¶µÊ•¡°º•ý§¨≥´»Ø§∑§ø3ºÔŒý§Œ•¢•Î•¥•Í•∫•ý§œ°¢§≥§ŒLIDAR§Œ•«°º•ø§ÚÕ¯Õ—§∑§∆∑–œ©§Ú∑◊≤˧π§Î°£ªÎ≥–§»∑–œ©∑◊≤Ë•∑•π•∆•ý§œ§…§¡§È§‚•Ì•Ð•√•»§À∆‚¬¢§µ§Ï§∆§™§Í°¢º´Œß•≥•Û•»•Ì°º•Î§¨≤ƒ«Ω§»§ §√§∆§§§Î°£
°°∫«ΩȧŒ•¢•Î•¥•Í•∫•ý§œ°¢•Ì•Ð•√•»§Àæ„≥≤ ™§Ú∏°Ω–§µ§ª°¢§Ω§Œ¬Á§≠§µ§»µ˜Œ•§Úø‰¬¨§µ§ª§Î°£§≥§≥§«§œ°¢ªÎ≥–§Ú√±Ω„≤Ω§∑°¢√œÃÃ§Úƒæ¿˛§»§∑§∆¬™§®§ÎºÍÀ°§¨§»§È§Ï§∆§§§Î°£§π§Ÿ§∆§Œæ„≥≤ ™§œ°¢§≥§Œƒæ¿˛§´§È§Œ∞Ô√¶§»§∑§∆«ßº±§µ§Ï§Î°£
°°§≥§¶§∑§∆•Ì•Ð•√•»§¨æ„≥≤ ™§Ú∏°Ω–§π§Î§»°¢2»÷ÃЧŒ•¢•Î•¥•Í•∫•ý§¨µØ∆∞§∑§∆°¢•Ì•Ð•√•»§¨æ„≥≤ ™§Œ¬¶§Àπ‘§Ø§Þ§«§Œ•¢•◊•Ì°º•¡§Úƒ¥¿∞§π§Î°£•¢•Î•¥•Í•∫•ý§œæ„≥≤ ™§Þ§«§Œµ˜Œ•§À¥§≈§≠°¢§≥§Ï§Úõªˆ§À•Ø•Í•¢§π§Î§ø§·§Œ∫«≈¨§ •∏•„•Û•◊√œ≈¿§ÚÕΩ¬¨§π§Î°£§Ω§∑§∆°¢§≥§≥§´§Èªƒ§Í§Œ ‚…˝§Úƒ¥¿∞§∑§ƒ§ƒ°¢≤√∏∫¬Æ§∑§ §¨§ÈÃÐ…∏§Œ•∏•„•Û•◊√œ≈¿§Þ§«ø §ý°£§≥§Œ•¢•◊•Ì°º•¡ƒ¥¿∞•¢•Î•¥•Í•∫•ý§œ°¢∞Ï ‚§¥§»§À ‚…˝§Ú∫«≈¨≤Ω§π§Î§¨°¢§Ω§Ï§œ§Ô§∫§´100•þ•Í…√§»°¢»æ ‚§Œ¥÷§ŒΩ–Õ˪ˆ§¿°£
°°•Ì•Ð•√•»§¨•∏•„•Û•◊√œ≈¿§À≈˛√§π§Î§»°¢3»÷ÃЧŒ•¢•Î•¥•Í•∫•ý§¨≤∆˛§∑°¢•∏•„•Û•◊§Œµ∞∆ª§Ú∑˃ͧπ§Î°£æ„≥≤ ™§Œπ‚§µ§»•Ì•Ð•√•»§Œ¬Æ≈Ÿ§À¥§≈§≠°¢æ„≥≤ ™§Úõªˆ§À»Ù§”±€§®§Î§ø§·§À•‚°º•ø°º§¨»Ø¥¯§π§Î•—•Ô°º§¨∑˃ͧµ§Ï§Î°£§≥§Ï§œ•Ì•Ð•√•»§ŒƒÃæÔ§Œ ‚π‘§À≤√§®§Î•—•Ô°º§Ú¡˝≤√§µ§ª§Î§‚§Œ§«°¢∂‚ª·§À§Ë§Ï§–°¢Àк¡≈™§À§œ°÷æƧµ§ •∏•„•Û•◊§Œœ¢¬≥º¬ªÐ°◊§ §Œ§¿§Ω§¶§¿°£
¥∞ý˙§œ≈®
°°Ãëڧ§§≥§»§À°¢•¢•Î•¥•Í•∫•ý§œ∫«≈¨§ ƒ∑È•≥•Û•»•Ì°º•Î§Úº¬ªÐ§π§Î§‚§Œ§«§œ§ §Ø°¢§ý§∑§Ì•Ø•Í•¢≤ƒ«Ω§ §‚§Œ§«§¢§Î§À§π§Æ§ §§°¢§»∂‚ª·§œΩ“§Ÿ§∆§§§Î°£
°°°÷Œ„§®§–°¢•®•Õ•Î•Æ°º∏˙Œ®§ §…§Ú∫«≈¨≤Ω§∑§Ë§¶§»§π§Ï§–°¢•Ì•Ð•√•»§Àæ„≥≤ ™§Ú•Æ•Í•Æ•Í§«»Ù§”±€§®§µ§ª§Î§≥§»§À§ §Î§«§∑§Á§¶°£§«§π§¨°¢§≥§Ï§œ¥Ì∏±§ §‰§Í ˝§«°¢ÀÐ≈ˆ§À∫«≈¨§ ≤Ú§Úµ·§·§Î§ø§·§ÀÀƒ¬Á§ ∑◊ªªª˛¥÷§¨§´§´§√§∆§∑§Þ§§§Þ§π°£¡ˆπ‘ª˛§À§™§§§∆§œ°¢§Ë§Í∏˙Œ®≈™§ ≤Ú§Úµ·§·§Î§ø§·§Àƒπ§§ª˛¥÷§Ú»Ò§‰§∑§ø§Ø§œ§¢§Í§Þ§ª§Û°£•Ø•Í•¢≤ƒ«Ω§ §‚§Œ§¨ ¨§´§Ï§–§Ω§Ï§«§§§§§Œ§«§π°◊§»∂‚ª·°£
°°§ƒ§Þ§Í°¢§≥§Ï§À§Ë§√§∆•Ì•Ð•√•»§¨…¨Õ◊∞ 槌•∏•„•Û•◊§Ú§∑§∆§∑§Þ§¶§≥§»§‚§¢§Î§¨°¢§Ω§Ï§«Ã‰¬Í§ §§§»§§§¶§≥§»§¿°£∫«≈¨≤Ú§À∏«ºπ§∑§∆§∑§Þ§®§–°¢¡ˆ§√§∆§§§Î¥÷§À…¨Õ◊§»§µ§Ï§Îø◊¬Æ§ »Ω√«§¨§«§≠§ §Ø§ §√§∆§∑§Þ§¶°£
°°•¡°º•ø°º•Ì•Ð•√•»§Œƒ∑Ⱥ¬∏≥§œ°¢§Þ§∫•»•Ï•√•…•þ•Î§«π‘§Ô§Ï°¢§Ω§Ï§´§È•»•È•√•Ø槫º¬ªÐ§µ§Ï§ø°£•»•Ï•√•…•þ•Î槫§œ°¢ÕÕ°π§ π‚§µ§Œæ„≥≤ ™§¨ŒÆ§µ§Ï§ø°£§¿§¨°¢•»•Ï•√•…•þ•Î§Œƒπ§µ§œ4m§∑§´§ §´§√§ø§ø§·°¢√Ê¥÷§Ú¡ˆ§Î•Ì•Ð•√•»§œ§Ô§∫§´1m§Œ§¶§¡§Àæ„≥≤ ™§Ú∏°Ω–§∑°¢•∏•„•Û•◊§Ú∑◊≤˧∑§ §±§Ï§–§ §È§ §´§√§ø°£§Ω§Ï§«§‚°¢øÙ≤Û§Œº¬∏≥§«70•—°º•ª•Û•»§Œ¿Æ∏˘Œ®§Ú√°§≠§¿§∑§∆§§§Î°£
°°§≥§Ï§À»Ê§Ÿ§Î§»≤∞∆‚•»•È•√•Ø§«§Œº¬∏≥§œ°¢•π•⁄°º•π§»ª˛¥÷§¨¬ø§ØºË§Ï§Î ¨§œ§Î§´§À¥ √±§«§¢§Í°¢90•—°º•ª•Û•»§Œ¿Æ∏˘Œ®§Úµ≠œø§∑§ø°£
°°§ §™°¢∏¶µÊ•¡°º•ý§Œ∫£∏§Œ≤ð¬Í§œ°¢¡∏∂§ §…§ŒΩ¿§È§´§§√œ∑¡§«•È•Û•À•Û•∞•∏•„•Û•◊§Ú¿Æ∏˘§µ§ª§Î§≥§»§¿§Ω§¶§¿°£°°
via:newsoffice°¶∏∂ ∏ÀðÃı°ßhiroching
¢ß§¢§Ô§ª§∆∆…§þ§ø§§
 •Ì•Ð•√•»§§§∏§·°©Œ„§®∆∞∫Óº¬∏≥§» ¨§´§√§∆§§§∆§‚∂ª§¨§ª§ƒ§ §Ø§ §Î°¢•Ì•Ð•√•»∏§§Úª◊§§§√§≠§ÍΩ≥§√»Ù§–§πº¬∏≥±«¡¸¡ÌΩ∏ ‘
•Ì•Ð•√•»§§§∏§·°©Œ„§®∆∞∫Óº¬∏≥§» ¨§´§√§∆§§§∆§‚∂ª§¨§ª§ƒ§ §Ø§ §Î°¢•Ì•Ð•√•»∏§§Úª◊§§§√§≠§ÍΩ≥§√»Ù§–§πº¬∏≥±«¡¸¡ÌΩ∏ ‘ DARPA§Œø∑∫Ó°¢°÷•Ô•§•Î•…°¶•≠•„•√•»°◊§¨§ƒ§§§À∏¯≥´°£«≠§À§œª˜§∆§ §§§±§…º´Œß¡ˆπ‘§«ª˛¬Æ25•≠•Ì§«¡ˆ§Î§æ
DARPA§Œø∑∫Ó°¢°÷•Ô•§•Î•…°¶•≠•„•√•»°◊§¨§ƒ§§§À∏¯≥´°£«≠§À§œª˜§∆§ §§§±§…º´Œß¡ˆπ‘§«ª˛¬Æ25•≠•Ì§«¡ˆ§Î§æ §‰§–§§§´§ §ÍøÕ§√§ð§§°™DARPAΩ–ªÒ§ŒøÕ∑ø•Ì•Ð•√•»°÷•⁄•√•»•Þ•Û°◊§¨À…∏Ó…˛§Úø»§À§Þ§»§¶
§‰§–§§§´§ §ÍøÕ§√§ð§§°™DARPAΩ–ªÒ§ŒøÕ∑ø•Ì•Ð•√•»°÷•⁄•√•»•Þ•Û°◊§¨À…∏Ó…˛§Úø»§À§Þ§»§¶ DARPA§¨ªÒ∂‚±ÁΩı§∑§øøÕ¥÷§Ë§Í§‚¡·§Ø¡ˆ§Ï§Î•Ì•Ð•√•»§ŒªÓ∫Ó∑ø§¨ªÀæÂ∫«π‚¬Æµ≠œø§Ú§ø§ø§≠Ω–§∑§ø°÷•ÿ•√•…•Ï•π•Ì•Ð•√•»°¶•¡°º•ø°º°◊
DARPA§¨ªÒ∂‚±ÁΩı§∑§øøÕ¥÷§Ë§Í§‚¡·§Ø¡ˆ§Ï§Î•Ì•Ð•√•»§ŒªÓ∫Ó∑ø§¨ªÀæÂ∫«π‚¬Æµ≠œø§Ú§ø§ø§≠Ω–§∑§ø°÷•ÿ•√•…•Ï•π•Ì•Ð•√•»°¶•¡°º•ø°º°◊ DARPA§Œ•Ì•Ð•√•»§¨§Þ§øππ§À•ø°º•þ•Õ°º•ø°º≤Ω§∑§∆§≠§ø§º°£
DARPA§Œ•Ì•Ð•√•»§¨§Þ§øππ§À•ø°º•þ•Õ°º•ø°º≤Ω§∑§∆§≠§ø§º°£§≥§Œµ≠ªˆ§¨µ§§À∆˛§√§ø§È
§§§§§Õ°™§∑§Ë§¶
§§§§§Õ°™§∑§Ë§¶
•´•È•—•§•¢§Œ∫«ø∑µ≠ªˆ§Ú§™∆œ§±§∑§Þ§π
øÕµ§µ≠ªˆ
∫«ø∑Ωµ¥÷•È•Û•≠•Û•∞
§‚§√§»∆…§ý
 1575
1575 3836
3836 90
90 116
116



•π•ð•Û•µ°º•…•Í•Û•Ø




























































•≥•·•Û•»
1. ∆øÃæΩËÕ˝»…
§π§√§≤°º°º°º
§¢§»§œ±¶¿Þ°¢∫∏¿Þ°¢
2. ∆øÃæΩËÕ˝»…
øÕ§ÀΩ≥§È§Ï§∆§øbigdog§Œ∫¢§¨≤˚§´§∑§§
3.
4. ∆øÃæΩËÕ˝»…
§‚§¶•¢•∑•‚ƒ∂§®§ø§
5. ∆øÃæΩËÕ˝»…
∆∞§≠§¨•Í•¢•Î§ øÕ∑ø•Ì•Ð•√•»§œ•≠•‚•§§±§…∆∞ ™∑ø•Ì•Ð•√•»§«§‚Ωº ¨•≠•‚•§§ °£
§≥§Û§ §‚§Û§¨ƒ…§§§´§±§∆§≠§ø§È§»ª◊§¶§»°ƒ
6. ∆øÃæΩËÕ˝»…
•¡°º•ø°º§»§§§¶§€§…§Œ¡ˆ§Í§À§œ§ §√§∆§§§ §§§æ°¡°£
7. ∆øÃæΩËÕ˝»…
§ §Û§´∏´§∆§∆°…§¨§Û§–§Ï°™°…§√§∆§§§§§ø§Ø§ §Î§
8. ∆øÃæΩËÕ˝»…
£∂¬≠§ §È ¨§´§Î§±§…£¥¬≠§«°¢§»§§§¶§Œ§œ¿®§§§«§π§Õ°£
¥Í§Ô§Ø§–°¢∑≥Õ—≤Ω§µ§Ï§∆øÕ¥÷ºÌ§Í§Àª»§Ô§Ï§ §§ªˆ§Úµß§Í§ø§§§«§π°ƒ
9. ∆øÃæΩËÕ˝»…
¿®§§§»§≥§Ì§Þ§«Õ˧ø§ §°°ƒ
ΩΩøÙ«Ø∏§»§´§À§œøÕ∏˝»È…ʧ«•´•‚•’•È°º•∏•Â§∑§ø§Èº´¡≥§Œ∆∞ ™§»∂Ë Ã§ƒ§´§ §Ω§¶
10. ∆øÃæΩËÕ˝»…
§π§≤§ß¶≤° éþß’éþ°À
§≥§Ï°¢§¢§ŒΩ≥§√»Ù§–§µ§Ï§∆§‚¬—§®§∆§ø∑Úµ§§ •Ì•Ð§Œø ≤Ω∑¡°©
¿∏§≠ ™§Œ∆∞§≠§Úµ°≥£§«∫∆∏Ω§π§Î§√§∆¿®§Ø∆Ò§∑§§§Û§¿§ §»≤˛§·§∆ª◊§√§ø°£
º´¡≥§√§∆§π§¥§§°£
11. ∆øÃæΩËÕ˝»…
•¡°º•ø°º§»§§§¶§´¿∏§Þ§Ï§ø§∆§Œª“µÌ§Œ§Ë§¶§
§«§‚§π§≤§ß°™
12. ∆øÃæΩËÕ˝»…
ÀÐ≈ˆ§À§¢§»20«Ø§‚§∑§ø§È•¢•Û•…•Ì•§•…§»§´º¬∏Ω§∑§∆§Ω§¶§¿§ §¢
13. ∆øÃæΩËÕ˝»…
¢®6
∑اœª∫§Þ§Ï§∆§π§∞§À ‚§±§ø°©
•œ•§•œ•§§¿§√§∆ÃµÕ˝§¿§√§ø§œ§∫§¿§¨°£
14. ∆øÃæΩËÕ˝»…
•…•≠§√§»§œ§π§Î§¨°¢≤ƒ∞¶§§§´°©
15. ∆øÃæΩËÕ˝»…
¿®§§§Œ∞Ï∏¿ ±˛±Á§∑§ø§Ø§ §Î ¿∏§≠§∆§ §§§Œ§À∞¶§È§∑§µ§Ú¥∂§∏§Î°£
16. ∆øÃæΩËÕ˝»…
•Ð•π•»•Û•¿•§• •þ•Ø•π§´§»ª◊§√§ø§ÈMIT§´
17. ∆øÃæΩËÕ˝»…
•∏•„•¨°º°¢•§•∏•ß°º•Ø•»
18. ∆øÃæΩËÕ˝»…
ªÕ¬≠ ‚π‘§œ∆Û¬≠§Ë§Í§œÕ∆∞◊§«§∑§Á§¶°£°°∏∂ªœ≈™§ ¿∏§≠ ™§€§…¬≠§¨¬ø§§§∑°£
§Ω§Ï§«§‚∆∞ ™§Œ•·•´•À•∫•ý§Úµ°≥£§«∫∆∏Ω§π§Î§Œ§œ¬Á —§ ∫Ó∂»§ §Û§¿§ °£
19. ∆øÃæΩËÕ˝»…
∆¸ÀЧœ§…§Û§…§Û√÷§§§∆§§§´§Ï§Î
20. ∆øÃæΩËÕ˝»…
¡ˆ§Í ˝§¨§‚§¶µ°≥£§»ª◊§®§ §§
§≥§Û§ ∏¶µÊ§∑§∆§ø§ÈÀË∆¸§¨≥⁄§∑§§§¿§Ì§¶§ °¡
21. ∆øÃæΩËÕ˝»…
¬≠§Œ∆∞§≠§¨•¡°º•ø°º§»§œ∞„§¶§Ë§¶§¿§¨°£
§…§¡§È§´§»§§§®§–•¶•µ•Æ§∏§„§Õ°©°£
22. ∆øÃæΩËÕ˝»…
§≥§Ï°¢¬Á§≠§Ø§∑§ø§ÈæË§Ï§Ω§¶§¿§ °£
23. ∆øÃæΩËÕ˝»…
§¢§°^°¡•Ì•Ð•√•»§¨§‘§Á§Û§‘§Á§Û§π§Î§Û§∏§„§°^°¡
24. ∆øÃæΩËÕ˝»…
§Þ§¿º„¥≥§Œ§Æ§≥§¡§ §µ§œªƒ§Î§‚§Œ§Œ°¢ø ‚§œΩº ¨¥∂§∏ºË§Ï§Î°£
•Ì•Ð•√•»§√§∆≤ø§¿§´•Ô•Ø•Ô•Ø§µ§ª§∆§Ø§Ï§Î§ °£
25. ∆øÃæΩËÕ˝»…
∫«Ω™ÃÐ…∏§œ°¢√ʪ≥¬Áæ„≥≤§´§ °£
26. ∆øÃæΩËÕ˝»…
§¢§´§Û±«≤Ë•¡•„•√•‘°º∏´§ø∏§ §Û§«
§ §Û§´ÃاÀ¥∂æ∞Ð∆˛§∑§∆§∑§Þ§√§ø°¶°¶°¶
§¨§Û§–§Ï•¡°º•ø°º° °®ß•°®°À
27. ∆øÃæΩËÕ˝»…
•´•ø•´• §Œ•¡°º•ø°º§œ cheater §´§»ª◊§√§∆§§§øª‰§œø¥§¨±¯§Ï§∆§§§Þ§π°¢§¥§·§Û§ §µ§§
28. ∆øÃæΩËÕ˝»…
∫£§«§≥§Ω∂Ó§±§∆§Îª—§¨≤ƒ∞¶§§§‚§Û§¿§¨§≥§Ï§À≈®«ßº±•∑•π•∆•ý§»•Þ•∑•Û•¨•Û¿—§ý§Û§¿§Ì°©
29. ∆øÃæΩËÕ˝»…
¬≠§¨ ¬π‘§∑§∆∏«ƒÍ§µ§Ï§∆§ §§∆∞§≠§À§ §√§ø§È¥∞ý˙§À∆∞ ™§√§ð§Ø§ §Î§
30. ∆øÃæΩËÕ˝»…
§≥§ŒºÍ§Œ•Ì•Ð•√•»§ÀΩ∆≤–¥Ô§‰¿÷≥∞¿˛•‚•À•ø§¨¡ı√§µ§Ï§Î§≥§»§ÚπÕ§®§Î§»ø箧Î
31. ∆øÃæΩËÕ˝»…
•Ì•Ð•√•»§¨§™§™§Ë§Ω§√§∆§Œ§ÚÕ˝≤Ú§∑ªœ§·§∆§Î
32. ∆øÃæΩËÕ˝»…
ªÕ§ƒ¬≠•Ì•Ð•Ï°º•π§Þ§¿°º°©
33. ∆øÃæΩËÕ˝»…
¢®19
∆¸ÀЧœ§Ω§Ï§€§…∑≥º˚≥´»Ø§»§´§∑§∆õ§§§´§È§Õ°£
∏µ°π§≥§Ï§œ ‚ ºÕ—•¶•ß•ð•Û°¶•≠•„•Í•¢§»§∑§∆∏¶µÊ§µ§Ï§∆§§§ø§‚§Œ§¿§´§È°£
34. ∆øÃæΩËÕ˝»…
«≥Œ¡¥Þ§·§øΩ≈§µ§¨≤ð¬Í§ §Œ§´§
¡·§ØºÛ§À¡Í≈ˆ§π§Î§‚§Œ…’§±§∆§¢§≤§∆Õþ§∑§§§ §¢
§Ω§∑§ø§È§‚§√§»≤ƒ∞¶§Ø¥∂§∏§Î§Û§∏§„§ §´§Ì§¶§´
35. ∆øÃæΩËÕ˝»…
•≠•„•∑•„°º•Û§ÀΩ–§∆§ø•´•√•≥•§•§ªÕ¬≠∏§∑ø°©•Ì•Ðª◊§§Ω–§∑§ø°™
§‚§√§»¡∞§¿§»•–•”•Î2¿§§´°©
36. ∆øÃæΩËÕ˝»…
«ÿ∂⁄§Úª»§®§Î§Ë§¶§À§ §Î§»
§‚§√§»º´¡≥§ ∆∞§≠§À§ §Î§
37. ∆øÃæΩËÕ˝»…
¿€§§∆∞§≠§¨§ §Û§´∑Úµ§§¿§
38. ∆øÃæΩËÕ˝»…
≤ƒ∞¶§Øª◊§®§Î§Œ§œ§ §Û§«§ §Û§¿§Ìw
¬≠±ø§”§¨ÀÐ≈ˆ§ŒªÕ¬≠∆∞ ™§þ§ø§§§À§ §√§ø§È°¢∞ÏΩ÷∆∞ ™§´§»¥™∞„§§§π§Î§Ë§¶§À§ §Î§´§‚§∑§Ï§ §§
¡ˆ§√§ø§Í•∏•„•Û•◊§∑§ø§Í§œ¿®§§§Û§¿§±§…°¢§∆§√§≥§∆§√§≥§»«≠§þ§ø§§§ ‚§≠ ˝§∑§ø§È§‚§√§»≤ƒ∞¶§Ø§ §Î§»ª◊§¶§Û§¿
§≥§≥§«°ÿ§´§Ô§§§§°Ÿ§ÚÀæ§ý§¢§ø§Í§¨∆¸ÀÐøÕ§ §Û§¿§Ì§¶§´w
39. ∆øÃæΩËÕ˝»…
∆¸ÀЧœªÕ¬≠ ‚π‘§Œ•Ì•Ð•√•»§ƒ§Ø§È§ §§§Œ§´§
40. ∆øÃæΩËÕ˝»…
¢®8
"∏§"§»∏∆§–§Ï§ÎΩ”…“§´§ƒÃÒ≤§ º¥Ô§À¬–π≥§π§Ÿ§Ø
"π¸"§‰"§™§π§Ô§Í"§¨≥´»Ø§µ§Ï§Îªˆ§«§∑§Á§¶°£
41. ∆øÃæΩËÕ˝»…
§Ø§Ω§√°™…ȧ±§∆§È§Ï§Û°™°™°™
𑧱§√•¢•∑•‚°™§≥§√§¡§œÀ¿π‚ƒ∑§”§¿°™°™°™°™°™
42.
43. ∆øÃæΩËÕ˝»…
§≥§Û§ §Œ§¨•Ø•Ï•§•‚•¢≈ª§√§∆∆Õ§√π˛§Û§«§≠§ø§È£“£–£«∑‚§¡¬ª§∏§Î§¿§Ì§¶§ °£
44. ∆øÃæΩËÕ˝»…
∆π¬Œ§À§‚Ω¿∆¿≠§Úª˝§ø§ª§Î§≥§»§¨§«§≠§ø§È§‚§√§»º´¡≥§ ∆∞§≠§À§ §Î§¿§Ì§¶§Õ
45.
46. ∆øÃæΩËÕ˝»…
§¢§»§‚§¶æا∑§∑§ø§È°¢
∏ƒøÕ•™°º• °º° ªÙ§§ºÁ°©°À§¨µ¢¬§∑§øª˛°¢≤»§Œ±¸§´§È
•¿•√•∑•Â°Ð•∏•„•Û•‘•Û•∞¥ø¥Ó•¢•ø•√•Ø§Úºı§±§Î§≥§»§À§ §Î§Œ§´°ƒ
47. ∆øÃæΩËÕ˝»…
•≥•§•ƒ§œΩȧ·§∆∏´§øª˛§´§È§…§¶§À§‚¬ÃÃЧ¿°£
∏´§øÃЧ»∆∞§≠§Œ•Æ•„•√•◊§¨§¢§Í§π§Æ§Î°£
48. ∆øÃæΩËÕ˝»…
§¢§ŒΩ≥§È§Ï§∆§‚≈ð§Ï§ §§≈€§´°©
øΧÀÕ˧ÎΩͧާ«Õ˧ø§ °™§‰§œ§Í•Ì•Ð•√•»π©≥ÿ§œ§Þ§¿§Þ§¿π‘§±§Î§Œ§´°™
49. ∆øÃæΩËÕ˝»…
Ω≈ŒÃ§Ú∑⁄ŒÃ≤Ω§µ§ª§∆ª≈æ§≤§ §§§»°¢√Â√œ§«¬≠¿Ë§¨√œÃçÀ∆Õ§≠ª…§µ§√§∆•¬é••®•Û•…§ §Û§∏§„°©