
![楽園追放 Expelled from Paradise【完全生産限定版】 [Blu-ray]](http://livedoor.blogimg.jp/robosoku/imgs/0/0/001ae328.jpg)


![機動戦士ガンダム THE ORIGIN II [Blu-ray]](http://ecx.images-amazon.com/images/I/51wA9GlQdBL._CR79,113,193,350_.jpg)
![パシフィック・リム/ 7インチ アクションフィギュア ウルトラデラックス: オオタチ・カイジュウ [日本正規品]](http://livedoor.4.blogimg.jp/robosoku/imgs/3/a/3a9ef6d6.jpg)




![【Amazon.co.jp限定】 蒼穹のファフナー EXODUS 7(単巻購入特典:オリジナル全巻収納BOX、全巻購入特典:「第1・第2シーズン全巻収納BOX」引換シリアルコード付) [Blu-ray]](http://ecx.images-amazon.com/images/I/51Lnw4sFHbL._CR73,56,193,350_.jpg)
![【Amazon.co.jp限定】蒼穹のファフナー EXODUS 1 (オリジナル全巻収納BOX付) [Blu-ray]](http://ecx.images-amazon.com/images/I/515f6le4gEL._CR79,7,193,350_.jpg)
![【Amazon.co.jp限定】シドニアの騎士 第九惑星戦役 一(初回生産限定版)(オリジナルアートカード付) [Blu-ray]](http://ecx.images-amazon.com/images/I/51YoVcG9GdL._CR99,124,193,350_.jpg)
![【Amazon.co.jp限定】ガンダム Gのレコンギスタ 1(特装限定版) (全ディスク収納オリジナルデジパック付) [Blu-ray]](http://livedoor.blogimg.jp/robosoku/imgs/1/7/173a583f.jpg)
![【Amazon.co.jp限定】アクエリオンロゴス Vol.1 (全巻購入特典:「アニメ描き下ろしイラスト使用全巻収納BOX」引換シリアルコード付) [Blu-ray]](http://ecx.images-amazon.com/images/I/51MTEi4-GdL._CR38,16,193,350_.jpg)














![【Amazon.co.jp限定】 アルドノア・ゼロ 2(オリジナルデカ缶バッチver.2)(完全生産限定版) [Blu-ray]](http://livedoor.blogimg.jp/robosoku/imgs/7/3/7338f5a7.jpg)
![【Amazon.co.jp限定】白銀の意思 アルジェヴォルン 第1巻(初回生産限定版)(オリジナルデカ缶バッチ付) [Blu-ray]](http://livedoor.blogimg.jp/robosoku/imgs/1/d/1d1a0be0.jpg)


![キャプテン・アース VOL.3 初回生産限定版[Blu-ray]](http://livedoor.blogimg.jp/robosoku/imgs/7/c/7cee4322.jpg)

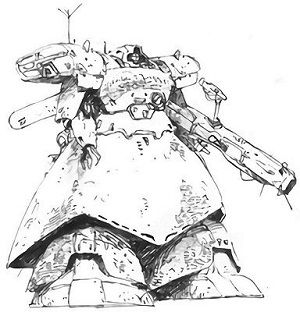
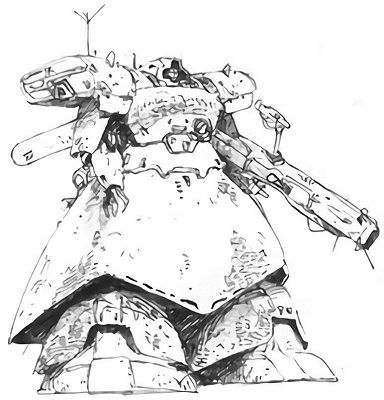
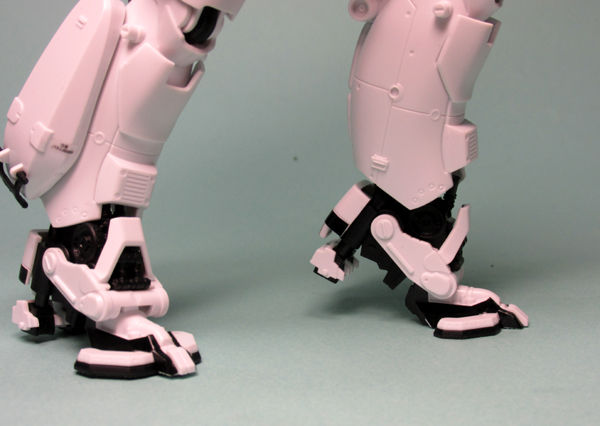
巨大ロボの接地面積ってこんなに必要なの?
元スレ/http://futalog.com/393960104.htm
1 名無しのろぼ 16/03/11(金)17:33:04 No.393960104
巨大ロボの接地面積ってこんなに必要なの?
2 名無しのろぼ 16/03/11(金)17:38:53 No.393960810
こうあからさまに広いと何か積んでるのバレバレだな
3 名無しのろぼ 16/03/11(金)17:45:12 No.393961600
>>1
押井曰くアニメや特撮でロボットの設置面積が大きいのはおもちゃ化した際それを安定して自立させる為で
実際巨大ロボがいたら不安定な足場でも安定して立たせる為に
設置面積は小さければ小さいほどいいんだと
4 名無しのろぼ 16/03/11(金)18:48:00 No.393971087
>>3
押井はむしろパトレイバーの足が人を踏まないように細くなってる設定は嘘ばっかりで
実際は見栄え重視で細くしただけであんな細い足で立ってられる訳ないだろって叩いてたじゃん
5 名無しのろぼ 16/03/11(金)19:27:53 No.393978011
>>4
でも実際のところ全然細くは無いんだけどねパトレイバー


【iOS】シリーズ最新作!SDガンダムストライカーズ
【Android】シリーズ最新作!SDガンダムストライカーズ
6 名無しのろぼ 16/03/11(金)17:59:08 No.393963483
>>3
これが安定する・・・?

7 名無しのろぼ 16/03/11(金)17:50:27 No.393962316
押井理論はヤメとけ
8 名無しのろぼ 16/03/11(金)17:51:58 No.393962521
>>3
多脚ならそうだけど
二脚なら設置面大きいほど安定するだろ
二脚で設置面小さい場合常に動き続けなきゃ立ってさえいられないぞ
9 名無しのろぼ 16/03/11(金)17:53:15 No.393962694
>>3
極小の設置面積の2足ロボをちょっと想像してみようね
10 名無しのろぼ 16/03/11(金)17:57:28 No.393963234
>>10
想像できた
kawaii!

11 名無しのろぼ 16/03/11(金)17:53:44 No.393962751
こいつはホバーの為だろ
12 名無しのろぼ 16/03/11(金)17:55:04 No.393962917
モーターヘッドみたいに反重力で吊り上げてるハイヒールか
車輪で舗装道路しか走らないつもりのローラースケートならわかる
13 名無しのろぼ 16/03/11(金)17:55:40 No.393962983
接地圧ってもんもあるから接地面積が小さいほどいいってのもどうかな
不整地行ったら脚が地面に刺さっちゃうんじゃ安定以前の問題に
14 名無しのろぼ 16/03/11(金)18:16:52 No.393966050
>>13
これに尽きるな
巨大ロボでなくても人間大60kgで針みたいな四足だと舗装面のような固いとこしか無理だろう
15 名無しのろぼ 16/03/11(金)17:56:02 No.393963036
スリッパが大きいとそのスリッパを動かすために駆動部が巨大化し
脚部ユニット全体の重量が大きくなり過ぎるというのも難点
16 名無しのろぼ 16/03/11(金)18:21:17 No.393966741
>>15
これ意外と無視されがちだよね
デカいパーツを動かそうとするとデカいフレームと動力が必要になり・・・のインフレーション
17 名無しのろぼ 16/03/11(金)17:56:44 No.393963135
どの程度巨大かにもよるなあ
18mと9mじゃだいぶ違う気もする
18 名無しのろぼ 16/03/11(金)17:57:31 No.393963243
体積は3乗、面積は2乗
19 名無しのろぼ 16/03/11(金)18:04:03 No.393964214
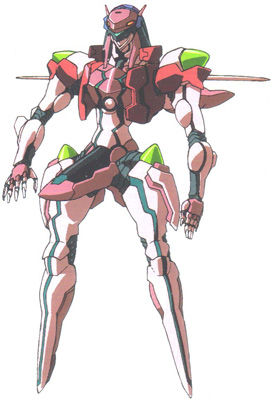
これは浮いてたっけか
20 名無しのろぼ 16/03/11(金)20:05:41 No.393985042
>>19
ZOEがこういう足の先駆って認識でいいのかな?
以前にもあったかもしれないけどZOE以降良く見るようになった気がする
21 名無しのろぼ 16/03/11(金)18:04:15 No.393964243
「接地面が大きいと安定して立てる」ってのは
立ってる地面が比較的平板なときだけだな
22 名無しのろぼ 16/03/11(金)18:04:20 No.393964249
動安定と静安定
23 名無しのろぼ 16/03/11(金)18:07:24 No.393964727
不安定な足場でも足の裏と足首が柔らかければ安定する
24 名無しのろぼ 16/03/11(金)18:09:33 No.393965034
>>23
ドラえもん最強
25 名無しのろぼ 16/03/11(金)18:11:28 No.393965314
ドラは浮いてるし…
26 名無しのろぼ 16/03/11(金)18:08:44 No.393964919
回転の力さえあれば接地面積とか関係無いんだよ

27 名無しのろぼ 16/03/11(金)18:13:40 No.393965611
>>26
歩行ロボだと回転の力に邪魔されて逆に歩きづらそう
28 名無しのろぼ 16/03/11(金)18:17:27 No.393966144
それらをより高度に制御する超すごいシステムができれば余裕
29 名無しのろぼ 16/03/11(金)18:19:10 No.393966410
反重力かなんかで浮く技術はよ
30 名無しのろぼ 16/03/11(金)18:20:48 No.393966669
>>29
足要らないな
31 名無しのろぼ 16/03/11(金)18:22:56 No.393966987
>>30
でもお偉いさんが付けろってうるさいんです
32 名無しのろぼ 16/03/11(金)18:24:18 No.393967199
本当のお偉いさんは主に玩具の安定性のほうを重視
33 名無しのろぼ 16/03/11(金)18:44:03 No.393970453
>>32
飾りです!

34 名無しのろぼ 16/03/11(金)18:27:19 No.393967641
実際巨大ロボいたら2脚にしないだろ
格好良さ重視でお願いします
35 名無しのろぼ 16/03/11(金)18:28:18 No.393967804
重力制御があれば銃弾当たらないしレーザーも軌道変えられるし
加速度も自在だからクソ硬い鉄球が敵に体当たりしまくるだけのつまらない絵面になる
36 名無しのろぼ 16/03/11(金)18:32:39 No.393968491
人間は実際のところ転びながらバランス取ってるわけで
バランサーの性能次第で何とかなるわな
37 名無しのろぼ 16/03/11(金)18:32:45 No.393968510
キャタピラかタイヤでええやん
足なんて
38 名無しのろぼ 16/03/11(金)18:34:54 No.393968846
二足じゃないと床が物で埋まってる俺の部屋が歩けない
39 名無しのろぼ 16/03/11(金)18:41:23 No.393969986
設置圧は減らせるだろうけど
移動時には安定性にはメリット低そうだ
棒立ちなら安定するが
40 名無しのろぼ 16/03/11(金)18:45:34 No.393970686
そうだ常に浮いていれば良いんじゃね?

41 名無しのろぼ 16/03/11(金)18:54:39 No.393972137
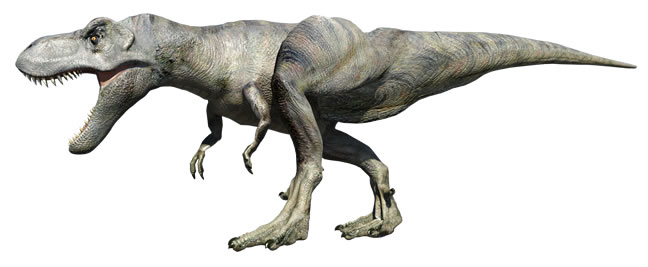
ティラノサウルスだって2本足で歩けるんだから
ロボもあのくらいにしておけばよくね?
42 名無しのろぼ 16/03/11(金)19:37:19 No.393979745
>>41
たしかにティラノも足の設置面積はそんな大きくないよな
体重は5~6トンとはいえ
43 名無しのろぼ 16/03/11(金)19:18:06 No.393976199
広く安定させつつパーツ分けして重さを分散させる足だったな
44 名無しのろぼ 16/03/11(金)19:22:34 No.393977036
こいつも結構足が小さいな
成人女性並だと思う
45 名無しのろぼ 16/03/11(金)19:24:30 No.393977380
人間は意図的にバランスを崩すことで二足で安定させている
なので完全な直立不動ができない
46 名無しのろぼ 16/03/11(金)19:31:03 No.393978586
つーか「立っていられるかどうか」ってのは重量に対する足の強度や油圧にもよる部分が大きいんで
別に細ければ立てないなんてことは無い
必要な強度を得られてれば鉄パイプで支えてるようなもんでも立つ(その材質がどんな密度の超金属でできてるのかはともかく)
47 名無しのろぼ 16/03/11(金)19:33:52 No.393979118
接地面積が広すぎるとデザインとしてパッと見たときの置き物感が凄く強いのよ
エンジンやオートバランサーやパイロットが無くても置き物のデザインとして成立しちゃう
48 名無しのろぼ 16/03/11(金)19:33:52 No.393979118

49 名無しのろぼ 16/03/11(金)19:37:31 No.393979788
巨体を支える地面も欲しいな
50 名無しのろぼ 16/03/11(金)20:06:28 No.393985210
こう見えて案外足は小さいやつ

51 名無しのろぼ 16/03/11(金)20:06:31 No.393985218
脚というか膝だけど

52 名無しのろぼ 16/03/11(金)20:51:59 No.393995076
多点杖みたいな足なら接地面積少なくて軽くて安定性も…と思った

関連商品


![蒼穹のファフナー EXODUS 3 [Blu-ray]](http://ecx.images-amazon.com/images/I/51FDOoaZvHL._CR18,51,300,200_.jpg)




【PS4】ガンダムブレイカー3 【Amazon.co.jp限定】起動戦士ガンダム キャラスタムシール(ジオン軍)付
posted with amazlet at 16.01.27
バンダイナムコエンターテインメント (2016-03-03)
売り上げランキング: 53
売り上げランキング: 53

【PS Vita】ガンダムブレイカー3 【Amazon.co.jp限定】起動戦士ガンダム キャラスタムシール(ジオン軍)付
posted with amazlet at 16.01.27
バンダイナムコエンターテインメント (2016-03-03)
売り上げランキング: 145
売り上げランキング: 145
")



