
![楽園追放 Expelled from Paradise【完全生産限定版】 [Blu-ray]](http://livedoor.blogimg.jp/robosoku/imgs/0/0/001ae328.jpg)


![機動戦士ガンダム THE ORIGIN II [Blu-ray]](http://ecx.images-amazon.com/images/I/51wA9GlQdBL._CR79,113,193,350_.jpg)
![パシフィック・リム/ 7インチ アクションフィギュア ウルトラデラックス: オオタチ・カイジュウ [日本正規品]](http://livedoor.4.blogimg.jp/robosoku/imgs/3/a/3a9ef6d6.jpg)




![【Amazon.co.jp限定】 蒼穹のファフナー EXODUS 7(単巻購入特典:オリジナル全巻収納BOX、全巻購入特典:「第1・第2シーズン全巻収納BOX」引換シリアルコード付) [Blu-ray]](http://ecx.images-amazon.com/images/I/51Lnw4sFHbL._CR73,56,193,350_.jpg)
![【Amazon.co.jp限定】蒼穹のファフナー EXODUS 1 (オリジナル全巻収納BOX付) [Blu-ray]](http://ecx.images-amazon.com/images/I/515f6le4gEL._CR79,7,193,350_.jpg)
![【Amazon.co.jp限定】シドニアの騎士 第九惑星戦役 一(初回生産限定版)(オリジナルアートカード付) [Blu-ray]](http://ecx.images-amazon.com/images/I/51YoVcG9GdL._CR99,124,193,350_.jpg)
![【Amazon.co.jp限定】ガンダム Gのレコンギスタ 1(特装限定版) (全ディスク収納オリジナルデジパック付) [Blu-ray]](http://livedoor.blogimg.jp/robosoku/imgs/1/7/173a583f.jpg)
![【Amazon.co.jp限定】アクエリオンロゴス Vol.1 (全巻購入特典:「アニメ描き下ろしイラスト使用全巻収納BOX」引換シリアルコード付) [Blu-ray]](http://ecx.images-amazon.com/images/I/51MTEi4-GdL._CR38,16,193,350_.jpg)














![【Amazon.co.jp限定】 アルドノア・ゼロ 2(オリジナルデカ缶バッチver.2)(完全生産限定版) [Blu-ray]](http://livedoor.blogimg.jp/robosoku/imgs/7/3/7338f5a7.jpg)
![【Amazon.co.jp限定】白銀の意思 アルジェヴォルン 第1巻(初回生産限定版)(オリジナルデカ缶バッチ付) [Blu-ray]](http://livedoor.blogimg.jp/robosoku/imgs/1/d/1d1a0be0.jpg)


![キャプテン・アース VOL.3 初回生産限定版[Blu-ray]](http://livedoor.blogimg.jp/robosoku/imgs/7/c/7cee4322.jpg)


つま先立ちのロボットwwwwwwwwwww
元スレ/http://futalog.com/412159430.htm
1 名無しのろぼ 16/06/05(日)17:12:30 No.412159430
つま先立ち他ロボットの足デザインスレ
今後のトレンドはどう移り変わっていくのか

2 名無しのろぼ 16/06/05(日)17:13:03 No.412159537
つま先立ちというかつま先しかなくね
3 名無しのろぼ 16/06/05(日)17:14:28 No.412159834
歩けるのこれ
4 名無しのろぼ 16/06/05(日)17:15:06 No.412159937
ピンヒールも減ったなあ

5 名無しのろぼ 16/06/05(日)17:15:57 No.412160106
>>4
謎物質で常時浮遊するから歩行できる構造じゃなくても問題ない
6 名無しのろぼ 16/06/05(日)17:18:33 No.412160585
鉄血見たらハイヒールばっかだったぞ
7 名無しのろぼ 16/06/05(日)17:21:23 No.412161104
これくらいの巨大スリッパは絶滅した印象

8 名無しのろぼ 16/06/05(日)17:22:13 No.412161275
トレンドにはならないだろうけどマンロディの足は好きだ
宇宙用ロケットの要素と歩くための足としての要素がうまく配分されてる

9 名無しのろぼ 16/06/05(日)17:24:17 No.412161619
ラプターもほっそい足してたな
まともな足してたのってLEVくらいだろ
10 名無しのろぼ 16/06/05(日)17:24:47 No.412161717
個人的にはあまり好きじゃないけれど多重関節型スリッパは何だかんだでもっと増えそう

11 名無しのろぼ 16/06/05(日)17:24:56 No.412161750
RIOBOTのはランディングギアつけてたなアヌビス
12 名無しのろぼ 16/06/05(日)17:26:05 No.412161994
ジェフティにあるんだしそりゃアヌビスにもあるだろうな
13 名無しのろぼ 16/06/05(日)17:28:05 No.412162444
14 名無しのろぼ 16/06/05(日)17:30:15 No.412162940
エルガイムから続くかかと2ブロック構造は地味ながら今も使われる
15 名無しのろぼ 16/06/05(日)17:31:38 No.412163217
形部足

16 名無しのろぼ 16/06/05(日)17:32:35 No.412163432
純粋なつま先立ちロボって実はそんなに無いのか
展開してヒール型に変形するものも多いし
17 名無しのろぼ 16/06/05(日)17:33:16 No.412163581
つま先立ちロボいっぱい出たイメージがある

18 名無しのろぼ 16/06/05(日)17:35:27 No.412164021
アニメ見てる時気にしてなかったけど
最初のやつと違ってハイヒールになってんだな

19 名無しのろぼ 16/06/05(日)17:36:41 No.412164279
ふくらはぎのバーニアのやっつけ感
20 名無しのろぼ 16/06/05(日)17:39:02 No.412164776
基本浮いてるやつは爪先立ちの印象

21 名無しのろぼ 16/06/05(日)17:39:04 No.412164780
クローはちょっと違うか?
22 名無しのろぼ 16/06/05(日)17:39:05 No.412164785
形部足はオービタルフレーム系の足に支え棒程度のかかとを加えた感じ
ダハックのはピンヒールの爪先とかかとの役割が逆になった構造だと思ってる

23 名無しのろぼ 16/06/05(日)17:39:13 No.412164813
つま先立ち合体ロボ
24 名無しのろぼ 16/06/05(日)17:41:36 No.412165337
着陸する時は展開

25 名無しのろぼ 16/06/05(日)17:44:52 No.412166056
2000年くらいを境にそれなりに大きめのスリッパがカッコいいって風潮から
小さめ・つま先立ちがカッコいいって風潮に変化したような気がする
26 名無しのろぼ 16/06/05(日)17:50:20 No.412167249

27 名無しのろぼ 16/06/05(日)18:06:07 No.412170927

28 名無しのろぼ 16/06/05(日)18:06:40 No.412171027
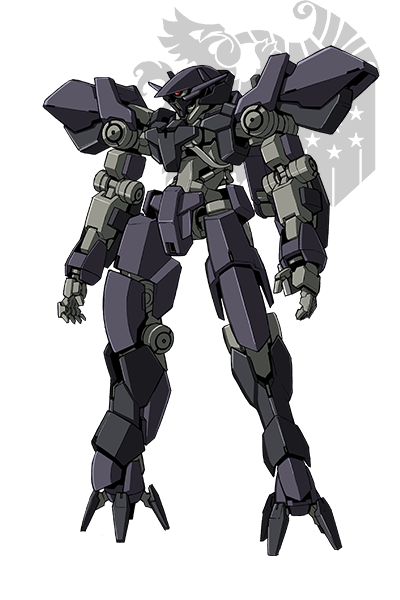
つま先立ちに見えるが構造的には巨大なヒール

29 名無しのろぼ 16/06/05(日)18:09:39 No.412171747
(元)エレシス

30 名無しのろぼ 16/06/05(日)18:29:52 No.412176627
鳥足は逆にデカスリッパに向かっている印象

31 名無しのろぼ 16/06/05(日)19:38:34 No.412192834
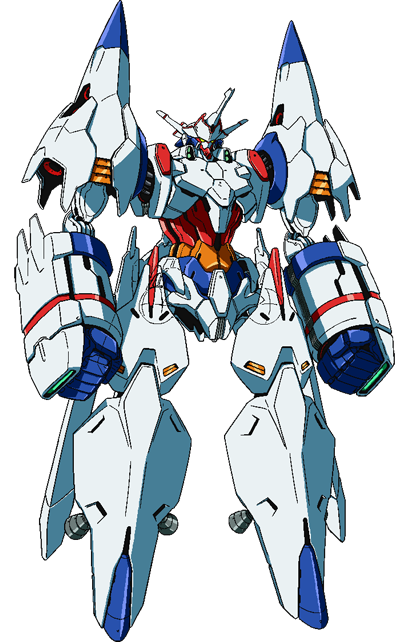
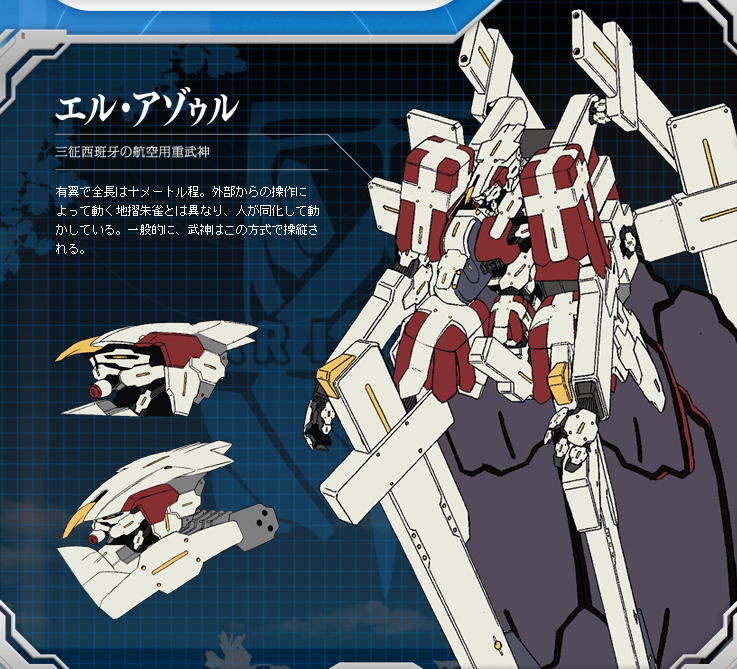
航空戦メインなので足首がない
しかしこれで地上戦をやる
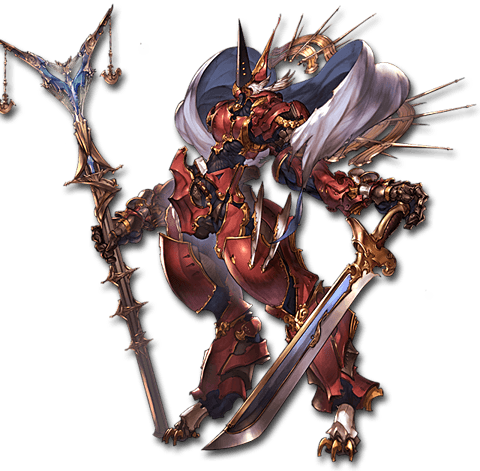
32 名無しのろぼ 16/06/05(日)17:56:48 No.412168667
純粋なつま先立ちってこういうのか

関連商品


![蒼穹のファフナー EXODUS 3 [Blu-ray]](http://ecx.images-amazon.com/images/I/51FDOoaZvHL._CR18,51,300,200_.jpg)




【PS3】スーパーロボット大戦OG ムーン・デュエラーズ 【Amazon.co.jp限定】オリジナルPC壁紙付
posted with amazlet at 16.03.24
バンダイナムコエンターテインメント (2016-06-30)

【PS4】スーパーロボット大戦OG ムーン・デュエラーズ 初回限定生産版 【Amazon.co.jp限定】オリジナルPC壁紙付
posted with amazlet at 16.03.24
バンダイナムコエンターテインメント (2016-06-30)
")



