























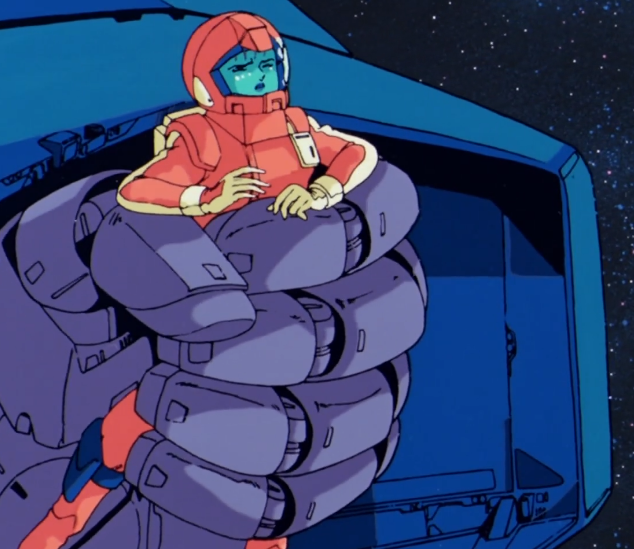
巨大メカのマニピュレーター怖い…
名無しのろぼ
巨大メカのマニピュレーター怖い…
名無しのろぼ
そーっと

名無しのろぼ
カタログで腕を組んでる魔神
名無しのろぼ
多分ショベルカーでワイングラスを注ぐ作業員並みに繊細に扱ってる
名無しのろぼ
痛そう

名無しのろぼ
場合によってはボタンとか押さなきゃいけないわけだし
強弱設定みたいなもんはあるのでは?
名無しのろぼ
優しく掴むモードがある
名無しのろぼ
隙間に挟まれたらどーすんのよ…

名無しのろぼ
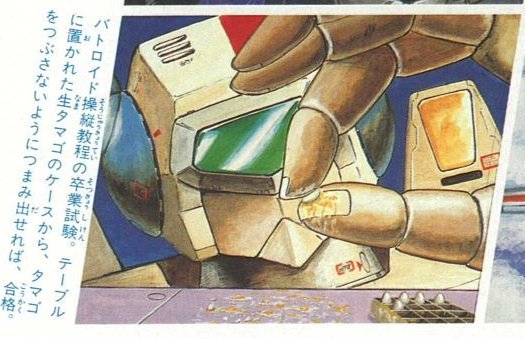
バルキリーは生卵だって掴める繊細さ
名無しのろぼ
手の動きをトレースするのは想像つくけどどうやって機体をその間に動かしてるのだろう?
名無しのろぼ
操縦は「対象を指定、動作選択>掴む」くらいに簡略化して
細かい操作や力加減はロボ側に任せた方が安心だと思う
名無しのろぼ
繊細だよなロボの手
名無しのろぼ
殴り合いしたら確実にぶっ壊れるというのをやってるロボものは少ない
名無しのろぼ
ガサラキと0083かな

名無しのろぼ
まあ画像の機体は後期になると「お前、壊れること心配する必要あるの?」って感じだけど

名無しのろぼ
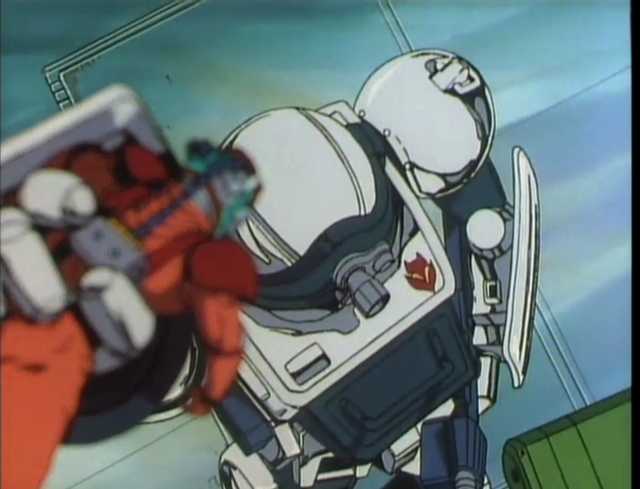
敵を握りつぶすとかじゃなく
味方を掴んだらミスか事故かで潰しちゃったとかないの
名無しのろぼ
ガンダムの指は女の子でも簡単に持ち上げられる

名無しのろぼ
ゴライオンとかブライガーはあの手で剣振り回すから器用
名無しのろぼ
悪役っぽい演出でよくニギニギするんだろうけど
普通に死ぬよねこれ
名無しのろぼ
死ぬ死ぬ
名無しのろぼ
どうして…
名無しのろぼ
ロボで人間掴むな
他ブログのおすすめ記事

【PS4】SDガンダム ジージェネレーション クロスレイズ プレミアムGサウンドエディション【早期購入特典】3大特典を入手できる特典コード(封入)【Amazon.co.jp限定】アイテム未定
posted with amazlet at 19.07.15
バンダイナムコエンターテインメント (2019-11-28)
売り上げランキング: 62
売り上げランキング: 62

【PS4】SDガンダム ジージェネレーション クロスレイズ【早期購入特典】3大特典を入手できる特典コード(封入)【Amazon.co.jp限定】アイテム未定
posted with amazlet at 19.07.15
バンダイナムコエンターテインメント (2019-11-28)
売り上げランキング: 165
売り上げランキング: 165

SDガンダム ジージェネレーション クロスレイズ プレミアムGサウンドエディション -Switch (【早期購入特典】3大特典を入手できる特典コード 同梱) 【Amazon.co.jp限定】アイテム未定 付
posted with amazlet at 19.07.12
バンダイナムコエンターテインメント (2019-11-28)

SDガンダム ジージェネレーション クロスレイズ -Switch (【早期購入特典】3大特典を入手できる特典コード 同梱) 【Amazon.co.jp限定】アイテム未定 付
posted with amazlet at 19.07.12
バンダイナムコエンターテインメント (2019-11-28)
![【Amazon.co.jp限定】コードギアス 復活のルルーシュ(特装限定版)(オリジナル特典:カフェゼロ2号店マグカップ&新規描きおろしB3クリアポスター) [Blu-ray]](https://images-fe.ssl-images-amazon.com/images/I/51m7E5IhG%2BL.jpg)
【Amazon.co.jp限定】コードギアス 復活のルルーシュ(特装限定版)(オリジナル特典:カフェゼロ2号店マグカップ&新規描きおろしB3クリアポスター) [Blu-ray]
posted with amazlet at 19.08.23
バンダイナムコアーツ (2019-12-05)
")


 メタルビルド")
